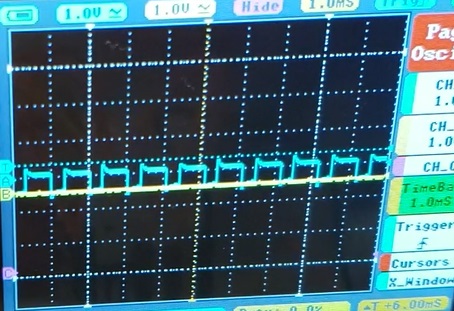
I purchased a diode laser from amazon. Bigger than my older laser. Has pwm cause im fancy. But i needed 5v pwm and my mach3/breakout board provides 0-10v analog. The easiest solution I could think of was once again to slap a nano on it. Here I am testing the circuit. The circuit uses 2 […]
Category Archives: CNC
Gear Design
1. Types of gears 2. Gear arrangements 3. Considerations – Strength, speed, friction/noise/vibration 4. Layout Calculations 5. Hypocycloid 6. Differential planet 1) Types of gears When looking at involute gears there are several categories of this type. Gear arrangements and types of gears are often used interchangeably but in my mind they are different. […]
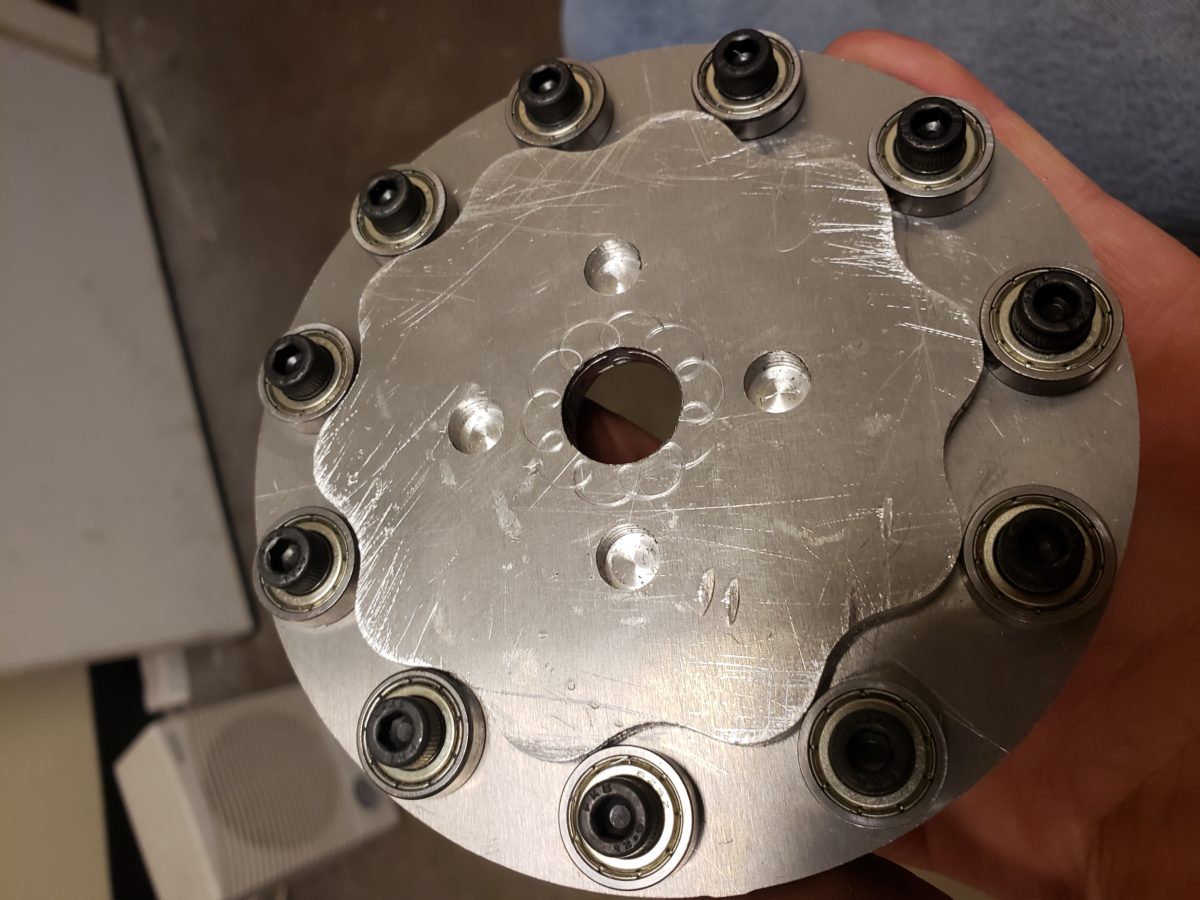
The Struggle of Custom Parts

Custom parts are hard to come by. Off the shelf parts are literally forming a trash island in the ocean. This is my dive into making custom parts. I could have gone at it a few different ways but my limitations are as follows. Time – I don’t want to spend 10 hours milling a […]
Milling a PCB
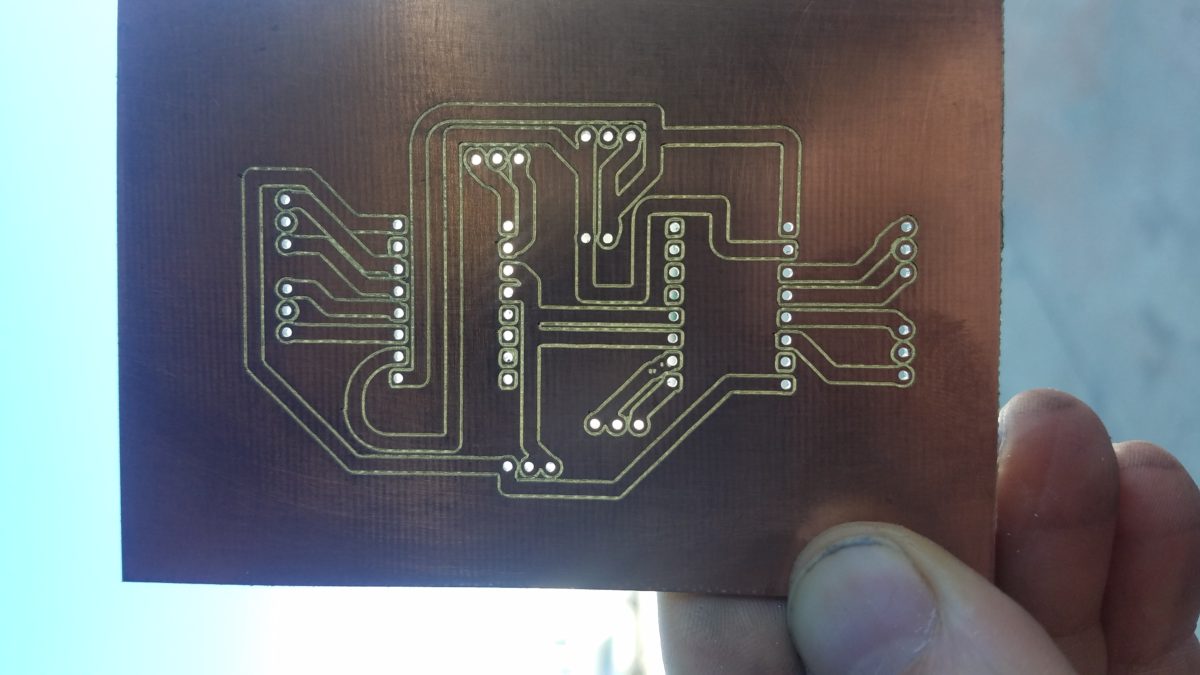
In order to better speed up my prototyping and in consideration of possibly small scale manufacturing I have begun milling my circuit board designs. This picture should give you a clear idea why this is so important. This is how myself, and many others, make circuit boards at home. By wrapping wire around the back […]
CNC milling with router

Here is my video with general info For my milling set up right now I’m using a 2 horsepower harbor freight router with the harbor freight speed control. Its definitely on the cheapest end of the setup but so far I am moving forward nicely. This whole setup is basically operated with a relay […]
Converting a CNC to do 3D printing
Here is the overview videos There are several parts you will need to convert a CNC to a 3D printer. Extruder CNC 3D printer Extruder This is a picture of my extruder. The bare aluminum is how I mount it to my cnc machine. The orange or copper piece hold my filament. As you can see […]
CNC Motors and Electronics
Check out the video Stepper Motors I chose 425 O.Z. inch stepper motors because I wanted to have some strength to perform tougher tasks. They came grouped as a kit with a power supply and motor drivers. Below is a visual representation of oz inch. It literally means that many oz at an inch away […]
My CNC setup for small scale manufacturing
In my pursuit of designing and building new things I have constructed a CNC machine of my own design with the help of some parts ordered over the internet. I made a short video explaining what it does as I continue to perfect the machine. Here is the video introduction where I talk about […]