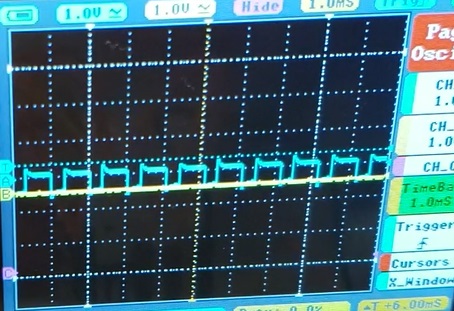
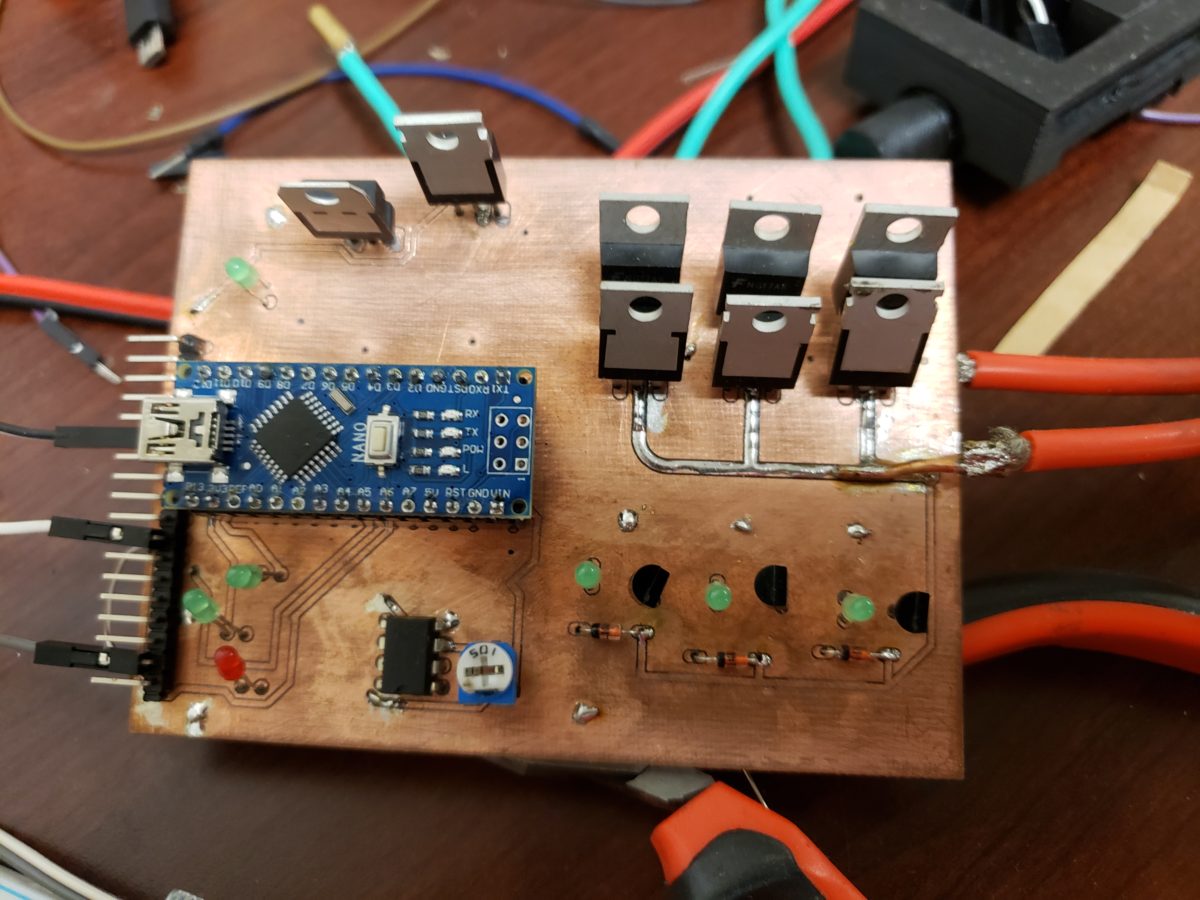
I purchased a diode laser from amazon. Bigger than my older laser. Has pwm cause im fancy. But i needed 5v pwm and my mach3/breakout board provides 0-10v analog. The easiest solution I could think of was once again to slap a nano on it. Here I am testing the circuit. The circuit uses 2 […]
Category Archives: arduino
Electronic Speed Controller
Every project I take on teaches me something new. Oddly enough its never humility. My recent design of an electronic speed controller for a brush less motor was a long and winding road in understanding how a motor could be controlled. The why is simple. If you want to build a robot there are zero…I […]